

1)前言
之前,我们介绍了绕线转子电机,也就是转子上和定子上有对称绕组布置的异步电机,但是,这还不是最简单的布置方式,事实上,异步电机是可以不需要绕线的,可以单纯通过耦合磁链对转子上的感应电流的作用来推动转子,这一节,我们来介绍最为典型的异步电机:鼠笼电机
鼠笼电机的转子造型一般像一个宠物松鼠的旋转笼子,故名鼠笼电机。鼠笼转子由冲压铁片多层包装,为了降低涡流,也像一般叠片铁芯做了绝缘处理,在叠片铁芯的槽中,有不加绝缘的导体棒,导体棒的两端盖子上通过短路环首尾连接构成一个笼子,这个笼子就形成了与绕线转子电机中的等价绕组 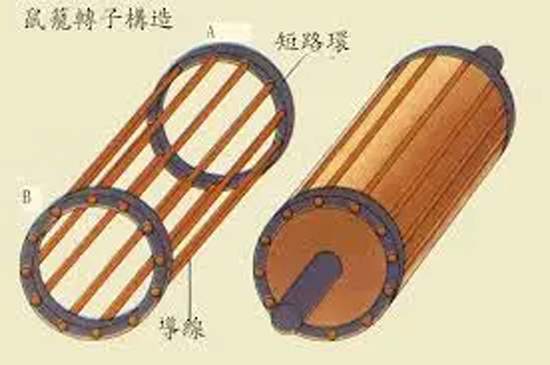
2)结构和主要原理
铜和铝的导电性比铁好多了,所以一阶近似后,尽管导体棒并未绝缘,转子电流基本上只在导体棒上流动,这些导体棒就相当于是多相绕组,转子表面槽的导体棒还要通过转子内部返回,形成封闭导通回路,这样就有了一个对称的多相绕组系统,其中共有QR捆闭合线圈束,每捆线圈束都是单独的导体棒加上返回回路组成的,所以等效绕组数为1/2
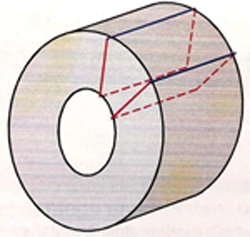
因为对称性,所有定子正弦式电流旋转场的总和感应出的转子电流为零,实际上可以省去“返回回路”,只要所有的导体棒都经由一个节点相接,也就形成了一个QR个角的星形连接,可以用等效导体回路代替
对于稳态工作状态的电压方程,可以类比绕线转子电机的推导过程。最简单的情况下,由于导体棒是在转子的圆周上对称布置的,所以可以看到这个鼠笼的基本元素就是一个转子网格,这个转子网格由两根导体棒以及两段短路环的端扇形切片构成,所以这段扇形切片占的弧长为αQ

为了使计算简化,我们假设定子坐标系统原点选在U相的定子线圈束中间,转子坐标原点选在转子网格的中间
在U,V,W线圈束上,流过电流

定子旋转磁场在定子坐标系产生的磁场基波为


转子机械角速度和角度为

定子和转子坐标系有如下关系

代入基波表达式121,就有

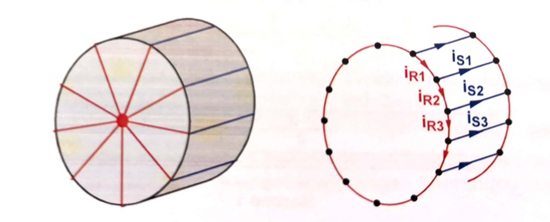
之前在绕线转子电机上,是在对称绕组上激发感应电压,而在鼠笼电机的转子上,感应电压是在笼子形状的导体棒和短路环上激发,如果我们把转子网格展开,就可以看到每个网格都是一个回路
考虑到电流强度与时间有关,每个转子网格内的导体棒电流及短路环电流分别为

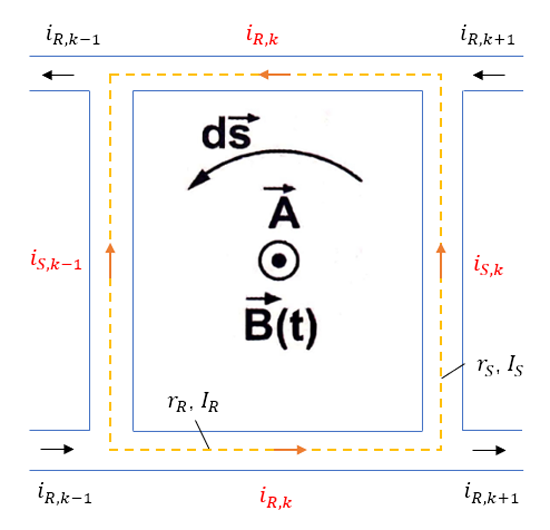
我们可以用法拉第感应定律来考察整个转子网格的电路,其中rR,lR为构成转子网格的短路环和槽间漏磁自感,rS,lS为构成网格的导体棒的电阻和槽间漏磁自感,我们对转子网格一周路径的电场进行积分


电流相量之间满足以下几何关系

代回原式,可以得到

其中RR为一个网格短路环的几何结构上的总等效电阻,类比旋转场定子在转子上的护肝,可以得到转子在定子上的护肝,而鼠笼电机的定子电压方程和在之前转子绕组不供电的绕线转子电机里的定子方程是一样的

所以,鼠笼电机和绕线转子电机的电压方程是一样的
3)集肤效应
一般鼠笼转子会使用圆形的导体棒,而对于大型电机来说,在电流极限圆上,它的短路点Pk会非常接近理想短路点P∞,这就导致,就算是有一个很大的启动电流,仍然只有一个很小的启动转矩,因此,使用直接启动的方式对于鼠笼电机来说是非常不经济的
对于绕线转子电动机而言,可以通过切换转子附加串联电阻来限制启动电流以及保持满转矩启动,但是也会带来更多损耗,而在鼠笼电机上,可以采用另外一个办法来实现相同的效果,也就是集肤效应,会随转速提高而增强
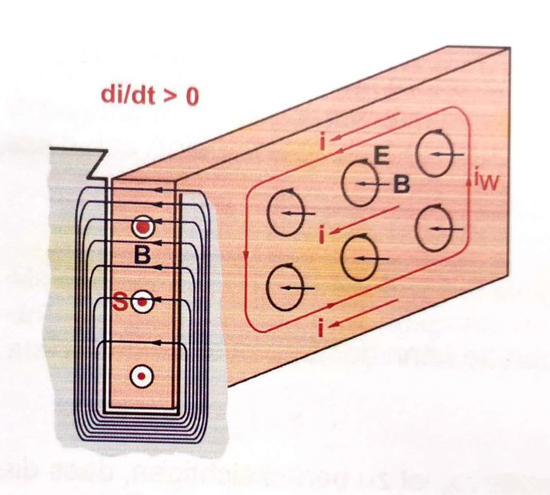
导体棒通入电流后,电流会在转子导体棒上均匀分布,即电流密度S恒定,导体棒电流会激发一个漏磁场,假设铁芯磁导率μr,Fe→∞,利用环路定理,可知槽上磁通密度B从槽底到槽顶线性增加
如果通入的电流是交流电,那么就会感应出变化的漏磁场,变化的漏磁场又带来感应电压,这样形成的涡流和原有转子感应电流加在一起导致电流分布不再均匀,在导体棒顶端的电流密度会比在底端高,而涡流大小又和感应电流频率成正比,所以,当转差频率fR不断提高时,电流差也会越来越悬殊,这就导致了有效的导体棒高度不断减少,因此转子电阻增大
交流电阻R(ωR)和导体棒本身的电阻R0之间可以用以下关系表示

电阻因数K取决于导体棒的电导性,导体棒和槽的几何形状以及转差速率,也就是说可以使用一些特殊形状来增强集肤效应,但是,需要注意的是,不在短路环以及不在铁芯里的导体棒几乎没有集肤效应
集肤效应会不可避免的带来很大的热损耗,大大降低电机的工作效率,所以在大型电机上需要尽量避免集肤效应,集肤效应只用来解决鼠笼电机的启动过程
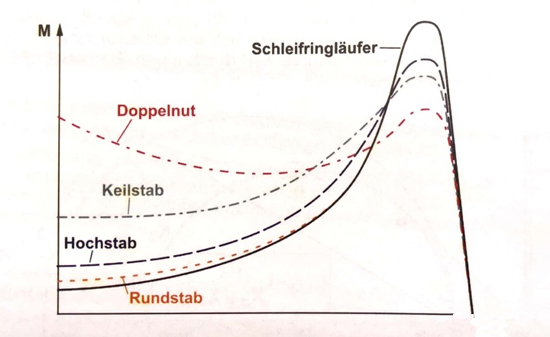
当然,使用特殊的造型,加工制造费用也会随之上升。除了使用一槽一棒的配置,还可以有双槽甚至多槽的鼠笼转子
鼠笼电机的定子构造以及电压方程如同绕线转子电动机,而转子经过等效转化后,其电压方程如同转子电路不供电的绕线转子电动机,相应的转矩、功率以及机械特性都可以类似描述